Tutorial 1: Suddenly started rectangular wing
Let's simulate a rectangular wing, suddenly started from rest into a constant freestream velocity.
Case directory setup
Use the newcase.sh script to generate a new 'case' directory with the name simplewing.case as described in Case directory setup.
Case setup
The config.nml file sets up global parameters that control the whole simulation like number of timesteps, timestep length and fluid density. For this case, the default settings should work fine. The relevant section is shown below and the number of timesteps nt is set to be computed from the time required for the wing to traverse 10 chord lengths. The timestep length dt defaults to time taken for traversing a distance 1/16th of the chord length. Intervals at which solution plots and results should be written out may be controlled in sections below the PARAMS section.
&PARAMS
! NO. OF TIMESTEPS [nt] TIMESTEP (sec) [dt] NO. OF ROTORS [nr]
! [nt]timesteps [0]default [-nt]chords or revs
nt = -10
dt = 0.0
nr = 1
! DENSITY [kg/m3] SOUND VEL. [m/s] KINEMATICVISC [m2/s]
density = 1.0
velSound = 330.0
kinematicVisc = 0.000018
/
Geometry required for each simulation is defined using the geomXX.nml files, where XX denotes a serial number. We shall simulate a wing of unit chord and aspect ratio 4. For the geom01.nml file, the relevant section is shown below. The parameter theta0 represent the wing pitch angle and the nomenclature is borrowed from rotorcraft conventions. The freestream velocity is set to 10 m/s using the vector velBody. Note the axis conventions used here. The negative sign is present since we are setting the velocity of the geometry which is towards the negative direction in an inertial coordinate frame.
&GEOMPARAMS
! Span[m] root_cut[r/R] chord[m] preconeAngle[deg]
span = 4.0
rootcut = 0.0
chord = 1.0
preconeAngle = 0.0
! Omega[rad/s] X-shaftAxis Y-shaftAxis Z-shaftAxis
Omega = 0.0
shaftAxis = 0.0, 0.0, 1.0
! theta0[deg] thetaC[deg] thetaS[deg] thetaTwist[deg]
theta0 = 5.0
thetaC = 0.0
thetaS = 0.0
thetaTwist = 0.0
! ductSwitch [0]Off [1]On
ductSwitch = 0
! axisymmetrySwitch [0]Off [1]On
axisymmetrySwitch = 0
! pivot point flapHinge spanwiseLiftTerm invert tauSpan
! from LE[x/c] from centre[r/R] [1]enable for swept/symmetric
pivotLE = 0.00
flapHinge = 0.0
spanwiseLiftSwitch = 0
symmetricTau = 1
! customTrajectorySwitch [0]Off [1]On
customTrajectorySwitch = 0
! u[m/s] v[m/s] w[m/s] p[rad/s] q[rad/s] r[rad/s]
velBody = -10.0, 0.0, 0.0
omegaBody = 0.0, 0.0, 0.0
! forceCalcSwitch
! [0]gamma [1]alpha [2]FELS No. of airfoil files
forceCalcSwitch = 0
nAirfoils = 0
/
The wing and wake discretization may be set in the PANELS section. Providing a large number of near wake rows using nNwake ensures that the wake surface is modelled with sufficient accuracy. nc and ns control the number of chordwise and spanwise panels on the wing.
&PANELS
! No. of blades,nb Prop convention [0]Helicopter [1]Prop
nb = 1
propConvention = 0
! Panel discretization [1]linear [2]cosine [3]halfsine [4]tan
spanSpacing = 2
chordSpacing = 1
! degengeom geometryFile from OpenVSP
geometryFile = 0
nCamberFiles = 0
! Chordwise panels,nc Spanwise panels,ns
nc = 4
ns = 13
! Near wake panels,nNwake [n]timesteps [-n]chords/revs
nNwake = 160
/
Simulation
To run the simulation we make use of the Makefile present in this case folder. Start the simulation using the make command. When the simulation is run, the current timestep is printed out on screen and a copy of the output is also written to volcanor.log.
During the simulation, basic monitors like force plots can be generated using the script provided in tools/plotit.py. For example, to monitor the force coefficient, use the -f flag.
./tools/plotit.py -f
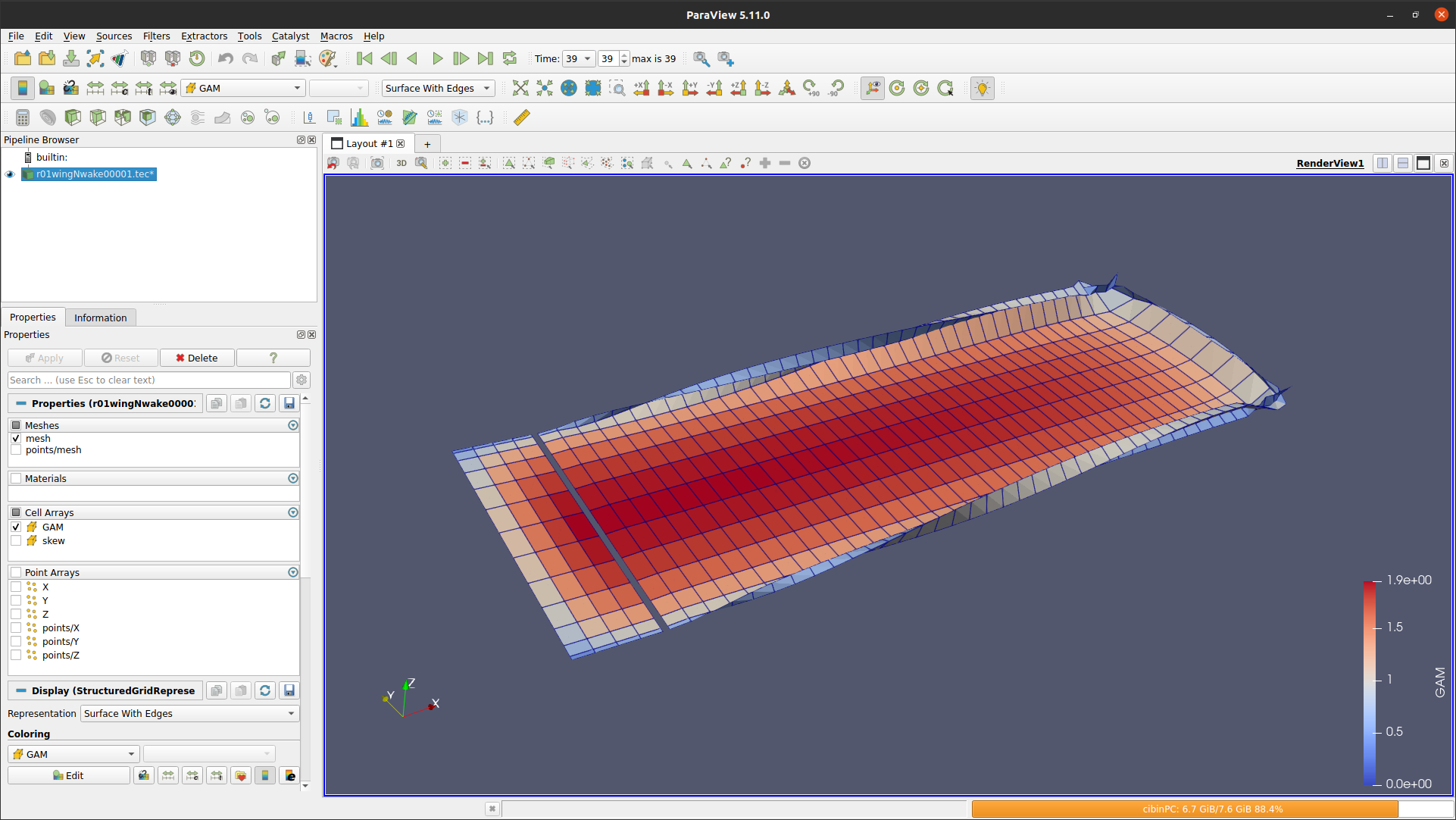
We can plot the wakes during or after the simulation completes. Paraview is a powerful data visualization software that is recommended to postprocess results. Alternatives like Tecplot or VisIt can also be used. Visualize the wake by opening the r01wingNwakeXXXXX.tec tecplot files generated by the solver in the Results directory.